
Walking Excavators
Walking wins when load and terrain dominate the design challenge.




Walking Excavators
Tl;DR:
Soviet walking excavators, also known as walking draglines, were massive mining machines developed from the 1950s to the 1980s. Designed for strip mining, these excavators moved large amounts of overburden using mechanical “walking shoes” instead of wheels or tracks. This unique locomotion system reduced ground pressure, allowing them to operate on soft or uneven terrain
Key mechanics include movement by hydraulic jacks or cams, electric motor power, and a rotating superstructure with a dragline bucket suspended from a long boom. Notable models include the ERS and EŠ series, some weighing thousands of tons.
The “walking” design addressed engineering challenges for extremely heavy machines, as traditional tracks would be impractically heavy, fragile, and costly to maintain. Walking mechanisms offered a workaround by spreading weight over a large footprint, reducing ground pressure to levels comparable to a human’s, enabling movement across soft ground without sinking, and offering a simpler, more reliable system with fewer moving parts.
While walking excavators are extremely slow, they excel in conditions where the machine doesn’t need to move often, the terrain is soft or uneven, and massive digging capacity is the primary goal. They are ideal for open-pit mining (especially strip coal mining), reclamation, overburden removal, and remote environments where prepared haul roads are absent. In essence, walking wins when load and terrain are the dominant design factors, whereas tracks are superior for speed and maneuverability.
Introduction
The Soviet walking excavator, often called the “walking dragline” or “walking excavator,” refers to a series of massive, mechanically complex mining machines developed in the Soviet Union (especially from the 1950s to the 1980s).
Design and Function
These machines were enormous strip-mining excavators designed to move huge quantities of overburden (soil and rock) in open-pit coal or ore mines. Instead of wheels or tracks, they used mechanical “walking shoes” or feet — large steel pads that lifted and shifted the entire body forward a few meters at a time. This system reduced ground pressure and made it possible to traverse soft or uneven terrain where wheeled or tracked vehicles would sink.
⚙️ Mechanics
Movement: The machine “walked” by lifting its base using hydraulic jacks or large cams, swinging its feet forward, and setting down again — somewhat like a mechanical bird stride.
Power: Typically powered by electric motors (often through external power cables).
Structure: Consisted of a rotating superstructure (like a crane) with a dragline bucket suspended by cables from a long boom — sometimes 100+ meters in length.
🏭 Notable Models
ERS series (e.g., ERS-1250, ERS-5000) — built by Uralmash and other heavy engineering plants.
EŠ series (ЭС) — another line of Soviet walking draglines, such as EŠ-10/70 or EŠ-15/90, where the numbers refer to bucket capacity (in cubic meters) and boom length (in meters).
Some of these machines weighed thousands of tons, comparable to the largest Bucyrus-Erie or Marion draglines built in the U.S.
🌍 Legacy and Surviving Examples
Many of these excavators operated in large open-pit mines across Russia, Ukraine, and other former Soviet republics. Some still exist today, rusting in place or being restored by enthusiasts. Their sheer scale and unusual locomotion have made them popular subjects for industrial photographers and documentary projects.
⚙️ 1. Why “walking” at all?
The walking excavator design was not a novelty — it solved specific engineering problems encountered by extremely large draglines.
When machines reach several thousand tons, traditional track systems (like those used on bulldozers or hydraulic excavators) become:
Impractically heavy — the tracks themselves would need to be enormous, weighing hundreds of tons.
Too fragile — track links, rollers, and idlers would fail under sustained stress.
Too costly to maintain — replacing track pads on such a scale is prohibitive.
Walking mechanisms were a clever workaround:
By spreading weight over a huge footprint (sometimes over 100 m²), they drastically reduced ground pressure — often below 0.1 kg/cm², similar to a human footprint!
They allowed the machine to “step” slowly across soft or unconsolidated ground (mud, overburden, mine tailings) without sinking.
Because walking units have few moving parts (a few jacks and cams vs. thousands of track components), they were simpler and more reliable for ultra-heavy equipment.
🚜 2. Efficiency Comparison: Walking vs. Tracks
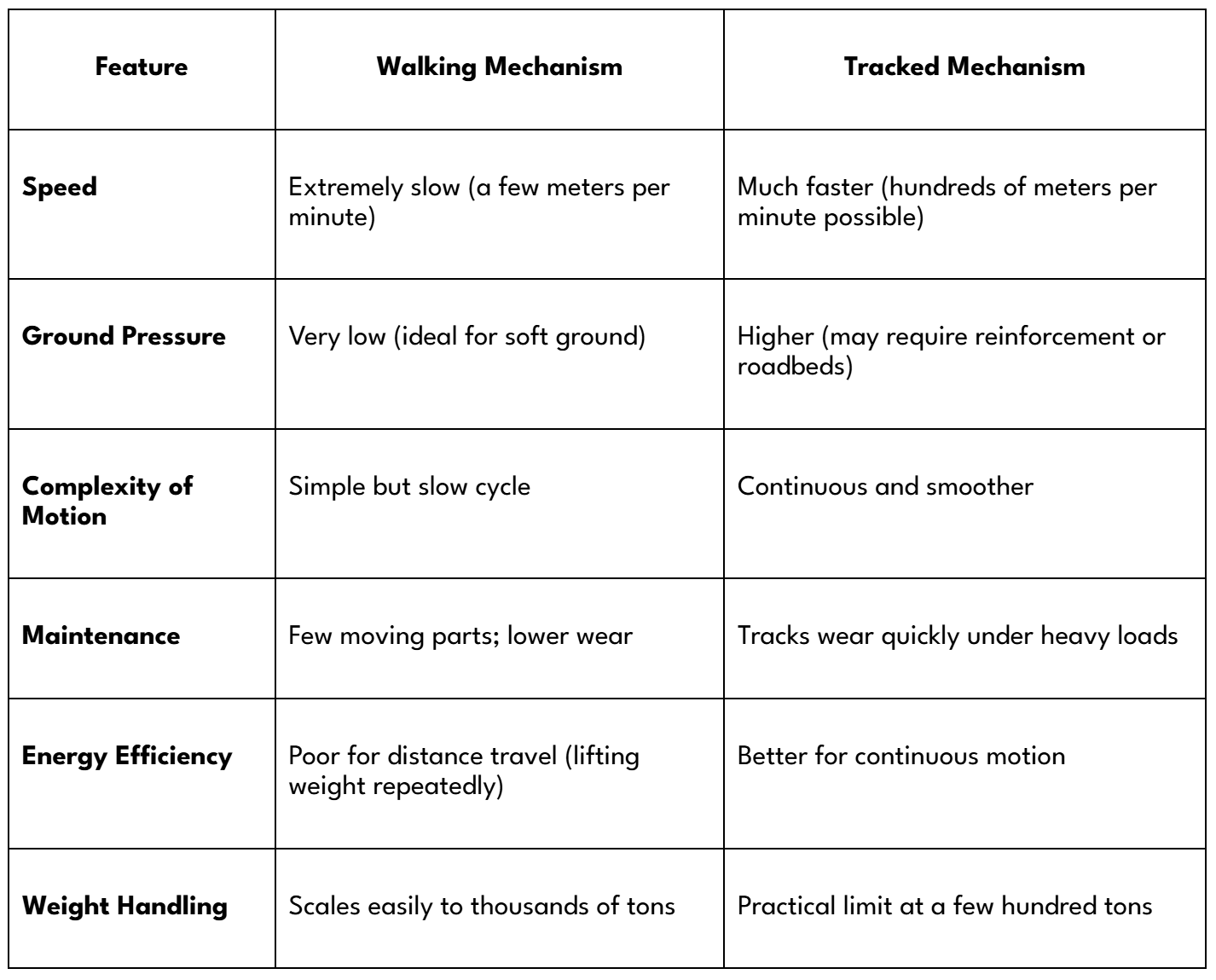
So: walking excavators are not efficient movers, but they are extremely effective when:
The machine doesn’t need to move often — just reposition occasionally within a mine cut.
The terrain is soft, loose, or uneven, where tracks would bog down.
The goal is massive digging capacity, not mobility speed.
🏭 3. Ideal Use Cases
The walking system is superior in these conditions:
Open-pit mining, especially strip coal mining, where the dragline must move periodically but spends 99% of its time stationary.
Reclamation or overburden removal — shifting spoil banks over soft, unconsolidated ground.
Remote or off-road environments — no need for prepared haul roads.
In contrast, for construction, logging, or quarrying — where machines must reposition frequently — tracks are far superior.
🧠 4. Engineering Perspective
Think of walking draglines as floating excavators that don’t need pontoons:
they move rarely, dig huge quantities per scoop (10–100 m³ per pass), and avoid sinking by distributing their weight.
Walking wins when load and terrain dominate the design challenge.
Tracks win when speed and maneuverability do.